Default Map
Optimizes for the loop formed in the Path
I'm a highly motivated Automotive Engineer with a great passion for Autonomous vehicles.
I am always looking for new things to learn and solve new real-world problems to keep life a little
challenging and interesting. I think self-driving vehicles are going to be an integral part of our
lives in the near future and I am pushing forward to make it a reality.
Optimizes for the loop formed in the Path
Reduces path length
Less computational time with Goal Check
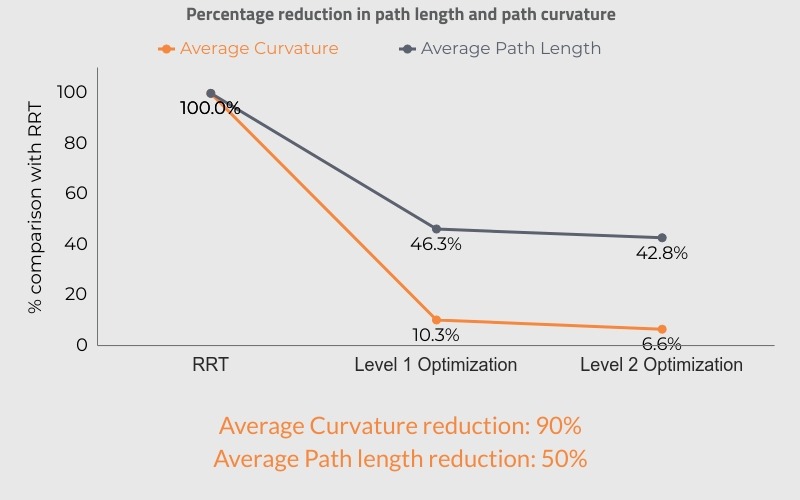
- Reduced the average curvature by 90% and path length by 50% with only a 10% increase in the overhead time
- Path obtained can be directly used by Path tracking controller
Used YOLO for AprilTag Detection
Used YOLO for line recognition

Used 2D Point cloud data from Lidar to navigate
Used Finite State Machine for Behavior control

Local Navigation in Obstacle Space
Detecting and Tracking Yellow line's center
Used 2D Lidar data to navigate
Local Navigation avoiding static obstacles
Turtlebot basics- Controls
Turtlebot basics- Lidar use
Autonomous Lane Keeping and ACC
Dynamic Path tracking algorithm

Geometric Path tracking algorithm
Stanley implementation in F1/10th simulator
Reactive Method of Obstacle Avoidance
Basic algorithm on F1_10th vehicle
Asymptotically optimal version of RRT
Force-based Local Navigation under uncertainity
Trajectory Planning
Local Navigation under uncertainity for crowd
Path Finding algorithms
Path Finding algorithms
Path Finding algorithms
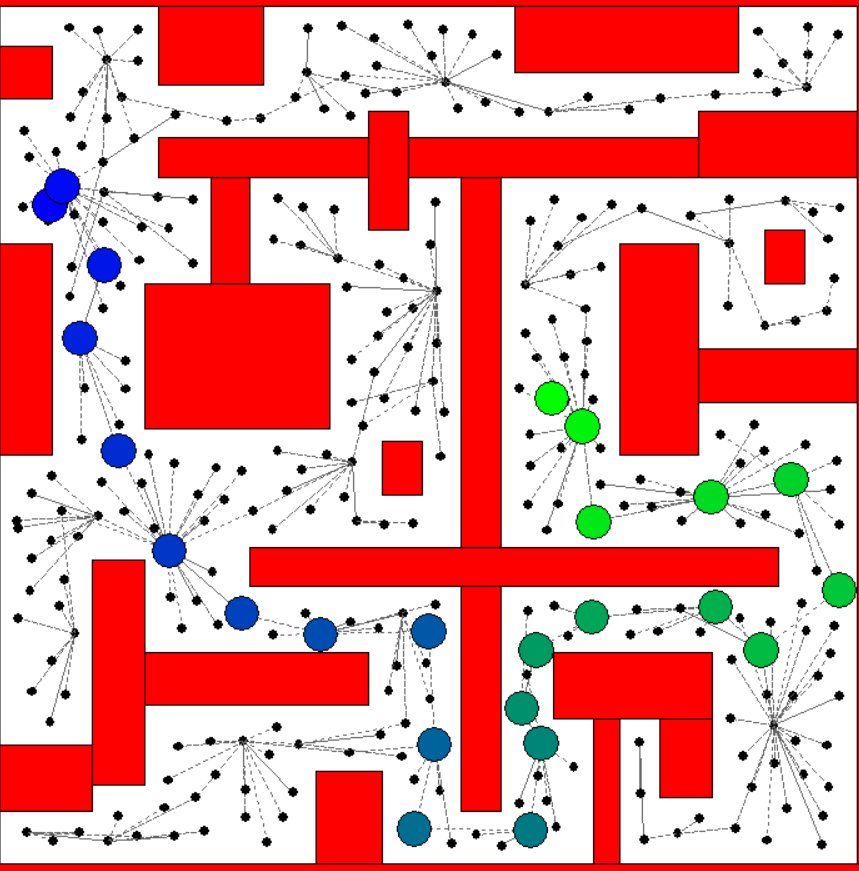
Sampling Based path planning algorithm